Cechy produktu
Wysoka wydajność: System sterowania wykorzystuje algorytm optymalnego planowania prędkości , umożliwiający szybką i dokładną obsługę i transfer materiałów, co znacznie zwiększa wydajność produkcji.
Stabilność: System sterowania gwarantuje stabilną i niezawodną pracę, minimalizując przestoje.
Doskonała elastyczność: Posiada konfigurowalny interfejs użytkownika (UI) umożliwiający dostosowanie do różnych zadań związanych z obsługą materiałów i przepływami pracy produkcyjnej.
Wydajność w czasie rzeczywistym: Algorytm systemu sterowania zapewnia wysoką responsywność w czasie rzeczywistym, umożliwiając szybką adaptację do różnych zmian i wymagań w środowisku produkcyjnym.
Bezpieczeństwo: System sterowania zawiera specjalną płytę bezpieczeństwa (lub „Moduł Bezpieczeństwa”), która w ramach struktury algorytmu zapewnia pełne bezpieczeństwo i stabilność robota podczas pracy.
Konfiguracja produktu
Część | Specyfikacja |
Kontroler robota | Opracowane samodzielnie (własnościowe) |
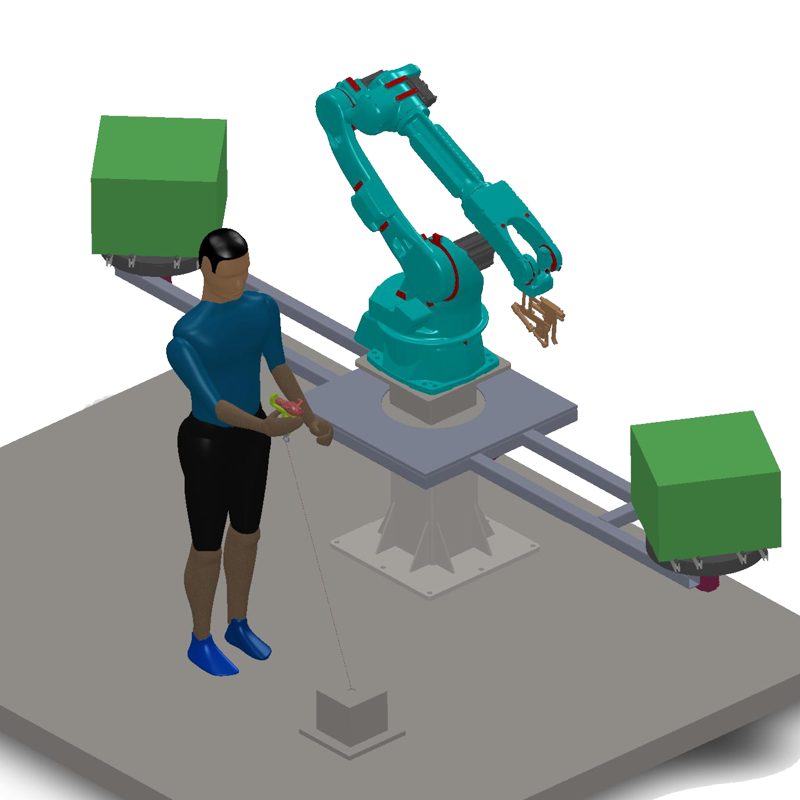
Manipulator robota | Robot MOOKA |
Tor robota / 7. oś | Opracowane samodzielnie (własnościowe) |